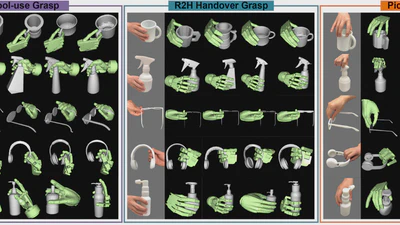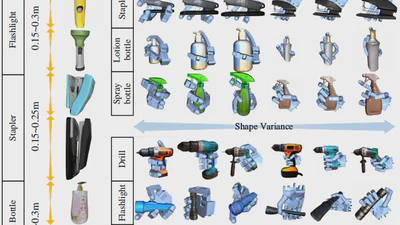
ScaleADFG: Affordance-based Dexterous Functional Grasping via Scalable Dataset
Our work "ScaleADFG" bridges the scale gap between human and robotic hands through automated dataset synthesis and lightweight grasp generation, achieving robust and generalizable …